このブログは@knight@のロボット・電子工作方面の活動を書いてるサイトです。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
こういった目的とコンセプトがあると作るのも楽しんだろうな・・・
デザインがかわいい~
こういった和みも大切ですね(^^ )
流体のフォルムは落ち着きを与えるから積極的に取り入れたいです
でも結構物に余裕無いとできないしな~
ROPOTAL
イガアさん投稿の電動ガン搭載の多脚戦車「ヴァンガ」
6脚で一つ3軸は使っているらしくその分動きが凄く滑らか!
追加武装も開発中らしいので今後も楽しみな機体です
ローラーダッシュもできるそう!凄いです
PR
無いと思っていたメモリースティックでしたが研究室に置いたままでした(^^;)
というわけで作業再開~
そういえば今日は大学で成績開示があり先生のところへ行きました
点数はまあまああで挽回の余地ありでした(^^;)
それはそうとその際の先生の部屋でサーボを使った開錠機械を発見、どうやら12f675でPWMのプログラムで操作しているそうです
自分もあんなふうに作りたいものです(^^ )
そういえば先日言っていた16F88のICSP搭載の品は妥協品ですが作って見ました



思った以上に部品が狭く今回はIC端子とピン端子は直結しています
上の写真ではついていませんが空いてる所にICSP端子を接続しています
18ピンは書き込みの配置は同じなので16F84Aも使えるはず

使う予定の7セグLEDの全点灯試験
1つ20mAとして全部で14*20=280mAの消費のはずです
明日こそは必ず・・・!作る!(グッ)
というわけで作業再開~
そういえば今日は大学で成績開示があり先生のところへ行きました
点数はまあまああで挽回の余地ありでした(^^;)
それはそうとその際の先生の部屋でサーボを使った開錠機械を発見、どうやら12f675でPWMのプログラムで操作しているそうです
自分もあんなふうに作りたいものです(^^ )
そういえば先日言っていた16F88のICSP搭載の品は妥協品ですが作って見ました
思った以上に部品が狭く今回はIC端子とピン端子は直結しています
上の写真ではついていませんが空いてる所にICSP端子を接続しています
18ピンは書き込みの配置は同じなので16F84Aも使えるはず
使う予定の7セグLEDの全点灯試験
1つ20mAとして全部で14*20=280mAの消費のはずです
明日こそは必ず・・・!作る!(グッ)
ホントしっかりしろよ自分な今日この頃です
とりあえずあいまいだった今後の予定を
2月
27日
2足ロボットの交流会があるので参加の予定
3月
3日
サークル内でのミーティング
話す内容は特になし
この月にブレイブの大会があるそうですが今回はパスします
できるだけ2足と電子に集中したいので・・・
4月以降は未定です
○電子工作
取りあえず学習と製作を平行、
最低限のスキルである「入出力」「割り込み」で「割り込み」をまともにしてなかったのでその辺を勉強しながら製作に入ろうと思います
ともかく今週は2足の練習会で追われると思います(^^;)
そうそう、先日久々にサークルに顔を出しましたら2足のスパーリングがあり2回ほどお手合わせいただきました
結果は1勝2敗、先輩方はやはり強いです(^^;)
近い練習会、何気にリベンジを果たそうと燃えていたりもします(ゴゴゴg
というわけで今週末の27日練習会、詳しくは大同大学ロボ研にてご覧ください~
それでは今日はこの辺で
good bye!
とりあえずあいまいだった今後の予定を
2月
27日
2足ロボットの交流会があるので参加の予定
3月
3日
サークル内でのミーティング
話す内容は特になし
この月にブレイブの大会があるそうですが今回はパスします
できるだけ2足と電子に集中したいので・・・
4月以降は未定です
○電子工作
取りあえず学習と製作を平行、
最低限のスキルである「入出力」「割り込み」で「割り込み」をまともにしてなかったのでその辺を勉強しながら製作に入ろうと思います
ともかく今週は2足の練習会で追われると思います(^^;)
そうそう、先日久々にサークルに顔を出しましたら2足のスパーリングがあり2回ほどお手合わせいただきました
結果は1勝2敗、先輩方はやはり強いです(^^;)
近い練習会、何気にリベンジを果たそうと燃えていたりもします(ゴゴゴg
というわけで今週末の27日練習会、詳しくは大同大学ロボ研にてご覧ください~
それでは今日はこの辺で
good bye!
土日に更新しなかったので更新
とりあえず名古屋には帰ってきました
しばらくはPICの勉強をしながらロボットの構想を進めるつもりです
○電子工作
現在16F88を使った7セグ回路(I2C通信有)を構成中ですがなかなか時間が掛かりそうです(^^;)
詳細は後ほど
○ロボット
大学では2足歩行班に所属していることになっているのでオリジナルを考えながら自作も考え中です
そうそう、今週の何日かに練習会とかがあるらしいので参加の予定です
自作はサーボコントローラーなどを中心に進める予定です
現状で決まっている「最低限」のスペックは
・本体重量1lg以下(U1K対策)
※バッテリー重量を含む
・脚部に8軸、腕部は6軸以上(U1K対策)
※総軸数は14~15の予定
・脚部の長さは20cm以下(ROBOーONE規格)
※また足裏は足の長さの60×40[%]です
・受信機・送信機は既製品を使用
※要検討中
といったところです
それと研究用にPICの専用基盤も構想中でした
まずはそれを作る予定です
それはまた次回に詳細報告します
では今日はこの辺で
とりあえず名古屋には帰ってきました
しばらくはPICの勉強をしながらロボットの構想を進めるつもりです
○電子工作
現在16F88を使った7セグ回路(I2C通信有)を構成中ですがなかなか時間が掛かりそうです(^^;)
詳細は後ほど
○ロボット
大学では2足歩行班に所属していることになっているのでオリジナルを考えながら自作も考え中です
そうそう、今週の何日かに練習会とかがあるらしいので参加の予定です
自作はサーボコントローラーなどを中心に進める予定です
現状で決まっている「最低限」のスペックは
・本体重量1lg以下(U1K対策)
※バッテリー重量を含む
・脚部に8軸、腕部は6軸以上(U1K対策)
※総軸数は14~15の予定
・脚部の長さは20cm以下(ROBOーONE規格)
※また足裏は足の長さの60×40[%]です
・受信機・送信機は既製品を使用
※要検討中
といったところです
それと研究用にPICの専用基盤も構想中でした
まずはそれを作る予定です
それはまた次回に詳細報告します
では今日はこの辺で
>>梨さん
コメントありがとうございます。
特用で1週間ほどテストができないので結果は追って報告させていただきます
>>少佐さん
秋月ではこういった商品も扱っているのは頼もしいですね
URLに載っていた部品はワンタイム(1回書き込み)品なので研究には不向きですが他の品も魅力的な部分は多いです
しかし個人の要望にマッチした品が無いのは仕方が無いですね(^^;)
大学のパソコンの壁紙に「無いものを作れ」という言葉の画像があるのですがまさにそれだとおもいました。
現在特用で作業環境を離れる事になってしまいましたがデータは作れるので今のうちにいろいろと作ってみようと思います
右のほうにも今まで上げた設計図のデータとプログラムも見やすくするようにしてあげておきます
ある先輩さんがドットLEDについての考えを話していたので対抗して回路を考えてみる
8×8を例にあげるとピン数は多くなる、なのでそれを補助するICで制御すればPICに必要な足も減らせると思う
そこで74HC595というICを使ってみようと思う
しかしその制御には難点があり命令を送り実行させるまでの時間差がある場合細かい時間を伝えるものには向かないかもしれないという点もあります
PIC内部のほうで調整する方法もあるかもしれませんが・・・
とにかくそれの回路設計もこの機関にやっておこうと思います。
コメントありがとうございます。
特用で1週間ほどテストができないので結果は追って報告させていただきます
>>少佐さん
秋月ではこういった商品も扱っているのは頼もしいですね
URLに載っていた部品はワンタイム(1回書き込み)品なので研究には不向きですが他の品も魅力的な部分は多いです
しかし個人の要望にマッチした品が無いのは仕方が無いですね(^^;)
大学のパソコンの壁紙に「無いものを作れ」という言葉の画像があるのですがまさにそれだとおもいました。
現在特用で作業環境を離れる事になってしまいましたがデータは作れるので今のうちにいろいろと作ってみようと思います
右のほうにも今まで上げた設計図のデータとプログラムも見やすくするようにしてあげておきます
ある先輩さんがドットLEDについての考えを話していたので対抗して回路を考えてみる
8×8を例にあげるとピン数は多くなる、なのでそれを補助するICで制御すればPICに必要な足も減らせると思う
そこで74HC595というICを使ってみようと思う
しかしその制御には難点があり命令を送り実行させるまでの時間差がある場合細かい時間を伝えるものには向かないかもしれないという点もあります
PIC内部のほうで調整する方法もあるかもしれませんが・・・
とにかくそれの回路設計もこの機関にやっておこうと思います。
先日紹介したプログラムが何故か動作しない今日この頃
単純にPORTBとPORTAからLEDのアノードとカソード先に設置したNPNトランジスタのベース(仲介に10k)へ出力するプログラムなんですがそれが動かないというのも面妖な・・・
一応PORTAからの出力はできてるところを見ると機能してないのはPORTBだけみたいです
もしかしたら別の機能がI/O制御を阻害してるかもしれないので他の機能の設定をする必要がありそうですね
それと少し寄り道、
今日回路・プログラムを考える中秋月で売っている18F4550みたいな完成基盤を作ってみるのもありかなと思う
・ICSP(ピンソケット端子)
・丸ピン セラロック端子
・左右ピン足にVcc、Vss出力
・MCLREスイッチ
・5.5Vレギュレータ←電源用ピンヘッダ端子
・PIC用セラミックコンデンサあり
流石にプリント基板はコストとして難しいのでユニバーサル基盤で、あとICソケットの対応はユニバーサルでは無理かなとおもうので受け側を完全にピンソケットにしようかなと思う
幅のある24,28ピン端子とソケットを18に切断して使う手段もあるけど・・・ありかな
ICSPにピンソケットを使うのは出っ張りを減らすためで上手くいけばピン足を除いた基盤の高さも10mm以内に収められるかも
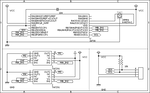
そんな回路の配線図はこちら

一応部品の明細も記入しましたが一部食い違いもありますのでご注意を
あと続きにアセンブラで書いた失敗したときの16F88のプログラムを入れておきます
それでは今日はこの辺で
単純にPORTBとPORTAからLEDのアノードとカソード先に設置したNPNトランジスタのベース(仲介に10k)へ出力するプログラムなんですがそれが動かないというのも面妖な・・・
一応PORTAからの出力はできてるところを見ると機能してないのはPORTBだけみたいです
もしかしたら別の機能がI/O制御を阻害してるかもしれないので他の機能の設定をする必要がありそうですね
それと少し寄り道、
今日回路・プログラムを考える中秋月で売っている18F4550みたいな完成基盤を作ってみるのもありかなと思う
・ICSP(ピンソケット端子)
・丸ピン セラロック端子
・左右ピン足にVcc、Vss出力
・MCLREスイッチ
・5.5Vレギュレータ←電源用ピンヘッダ端子
・PIC用セラミックコンデンサあり
流石にプリント基板はコストとして難しいのでユニバーサル基盤で、あとICソケットの対応はユニバーサルでは無理かなとおもうので受け側を完全にピンソケットにしようかなと思う
幅のある24,28ピン端子とソケットを18に切断して使う手段もあるけど・・・ありかな
ICSPにピンソケットを使うのは出っ張りを減らすためで上手くいけばピン足を除いた基盤の高さも10mm以内に収められるかも
そんな回路の配線図はこちら
一応部品の明細も記入しましたが一部食い違いもありますのでご注意を
あと続きにアセンブラで書いた失敗したときの16F88のプログラムを入れておきます
それでは今日はこの辺で
ということで凄い久々の適当な話です
近頃その辺の話と技術系のブログを分けようかなという考えもありましたがいちいち分けてするのも面倒なので現状維持で
あと右の方もいくつか修正しました
・最新情報
・プロフィール
・やったゲーム
じゃあいろいろ話すか
何かいつの間にかけいおん!の第2期が決定してそれが4月に決まりましたね
原作何気に近づいているのでかきふらい先生ガンバレー
それとこれもいつの間にかですが「蒼穹のファフナー」の特別編がまた製作決定だそうです
話は「彼」のようですがTVの総集編みたいにならないことを祈る
アーマードコアも5に突入
そうそう、5から機体のサイズが5,6mに変更されるそうです
その理由はずばり「環境の多様化」、
ボーダーブレイク、ナイトメアフレーム、エステバリスといった小型の機体の汎用性はそのサイズにあったのですね
それに今回のコンセプトは「暴力」
4の機動性とはまったくちがコンセプトで一撃必殺の要素がかなり大きくなるそうです
なにはともあれたのしみですね
(^^ )
俺の火掻き棒が火を吹k(ry
ちかごろ現実のロボット、おもに2足ロボットの作業も本格的になってきました
初期共同チームもそれぞれマイ・ロボットの購入も済ませ早いところでモーション作成をしているそうです
自分はキットを買うかだけで悩んでいますができれば自作方面に走りたいところ
しばらくは支給品ロボットでモーション作成だと思います
・・・あ、でも新入生も入ってくるしその辺はどうなるんだろうな・・・
まあそれはともかく今は
千里の道も一歩から!
ということでがんばるぞー
・・・別にいい事言って誤魔化していませんよ?
あちROBO-ONEで1kg以下の大会も決定されましたね
ROBO-ONEでは軸数の企画が決まってないので参加してもいいかなーと思っていましたが製作の予算が安定しない自分はこんかいだけは見送りという形を取らせていただきます
でもU1K、ROBO-ONE-right、ロボットフォースを考えると16軸以上で1kg以下になるので難しいです
特にサーボはKONDOで16軸は不可と判断し院生の先輩様の助言を頼りに自分はKONDOサーボ以外でのロボット作成も考えているつもりです
とりあえず初期目標は16軸、1kgの2足ロボットの制御といういことで
なのはの映画も公開されましたね、
ちなみに私は2回行きました(笑)
べ、べつに貰ったポイントカード目的じゃないからね!
でもできればフィルムになのは&フェイトの部分が入っていたらいいな~なんて思ってませんから!
それにしても劇場版は凄かった
プレシア・テスタロッサの過去、なのはの成長、なによりなのはとフェイトの最初で最後の真剣勝負は物凄い盛り上がりでした
正直2ndがそれを超えられるか不安になってきたw
そうそう、1月にはなのはフォースとvividの単行本も出ましたね
でもフォースはボーイミーツガールのためか少し魔王なのはの娘がメインのvividより人気が少ないそうです(´・ω・`)残念
個人的にはフォースは雑誌で追いかけているので楽しみにしています
ちなみに先日発売された今月号は6割が戦闘物、でもやっぱり1話のボリュームは少し控えめかなと思う部分もありますね
でも娘-tipe、実は4月号から偶数刊から月間に変更だそうですので楽しみです
最後の話
実は近頃「ボーダーブレイク」というゲームもたしなんでいます
何気に絆よりも気軽に死ねる戦える所や戦略性のある部分が大分好きでよくやっています
現在はB5→B4→B3→B4と迷走していますが着実に実力はつけていると思います
特に支援兵装での修理とショットガンは一撃必殺でもあるのでとても楽しいです~
昨日には標準軽量機「エンフォーサー」も追加されたのでますます盛り上がるかと
そうそう、ちなみにこの作品のプラモも続々出るそうなのでその辺も楽しみです(^^;)
・・・さて、新しいバイト先探さないとな(チャリーン)
ちなみに言ったか知りませんが10月から1月までバイトしていました
初めてのバイトだったのでいろいろと大変でしたがいい経験になったかと
その代価にちょっとした単位は痛手でしたが(何気にやめるきっかけが言い出せなかったorz)
しかもやめさせられたのがテスト終了直前って・・・鬼ですかオーナー・・・orz
まあそのおかげで毎週つぶれてた土日が有意義に寝れるのでありがたいです
・・・別に悔しくないもんっ!
・・・とまあこんなかんじですね
ボーダーブレイクは夕方が多いのでマッチしたときは「こいつか」と思っていろいろ修理の我侭言ってくださってもかまいませんので
それと主な筐体使用は名古屋、大須か109シネマのところでやっていると思いますのでよろしくです
それでは今日はこの辺で
アディオス!
PS:今期のアニメで「聖痕のクェイサー」ってあるけどニコニコのジャンルに「スタイリッシュ搾○アクション」って・・・なんじゃそらwww
近頃その辺の話と技術系のブログを分けようかなという考えもありましたがいちいち分けてするのも面倒なので現状維持で
あと右の方もいくつか修正しました
・最新情報
・プロフィール
・やったゲーム
じゃあいろいろ話すか
何かいつの間にかけいおん!の第2期が決定してそれが4月に決まりましたね
原作何気に近づいているのでかきふらい先生ガンバレー
それとこれもいつの間にかですが「蒼穹のファフナー」の特別編がまた製作決定だそうです
話は「彼」のようですがTVの総集編みたいにならないことを祈る
アーマードコアも5に突入
そうそう、5から機体のサイズが5,6mに変更されるそうです
その理由はずばり「環境の多様化」、
ボーダーブレイク、ナイトメアフレーム、エステバリスといった小型の機体の汎用性はそのサイズにあったのですね
それに今回のコンセプトは「暴力」
4の機動性とはまったくちがコンセプトで一撃必殺の要素がかなり大きくなるそうです
なにはともあれたのしみですね
(^^ )
俺の火掻き棒が火を吹k(ry
ちかごろ現実のロボット、おもに2足ロボットの作業も本格的になってきました
初期共同チームもそれぞれマイ・ロボットの購入も済ませ早いところでモーション作成をしているそうです
自分はキットを買うかだけで悩んでいますができれば自作方面に走りたいところ
しばらくは支給品ロボットでモーション作成だと思います
・・・あ、でも新入生も入ってくるしその辺はどうなるんだろうな・・・
まあそれはともかく今は
千里の道も一歩から!
ということでがんばるぞー
・・・別にいい事言って誤魔化していませんよ?
あちROBO-ONEで1kg以下の大会も決定されましたね
ROBO-ONEでは軸数の企画が決まってないので参加してもいいかなーと思っていましたが製作の予算が安定しない自分はこんかいだけは見送りという形を取らせていただきます
でもU1K、ROBO-ONE-right、ロボットフォースを考えると16軸以上で1kg以下になるので難しいです
特にサーボはKONDOで16軸は不可と判断し院生の先輩様の助言を頼りに自分はKONDOサーボ以外でのロボット作成も考えているつもりです
とりあえず初期目標は16軸、1kgの2足ロボットの制御といういことで
なのはの映画も公開されましたね、
ちなみに私は2回行きました(笑)
べ、べつに貰ったポイントカード目的じゃないからね!
でもできればフィルムになのは&フェイトの部分が入っていたらいいな~なんて思ってませんから!
それにしても劇場版は凄かった
プレシア・テスタロッサの過去、なのはの成長、なによりなのはとフェイトの最初で最後の真剣勝負は物凄い盛り上がりでした
正直2ndがそれを超えられるか不安になってきたw
そうそう、1月にはなのはフォースとvividの単行本も出ましたね
でもフォースはボーイミーツガールのためか少し
個人的にはフォースは雑誌で追いかけているので楽しみにしています
ちなみに先日発売された今月号は6割が戦闘物、でもやっぱり1話のボリュームは少し控えめかなと思う部分もありますね
でも娘-tipe、実は4月号から偶数刊から月間に変更だそうですので楽しみです
最後の話
実は近頃「ボーダーブレイク」というゲームもたしなんでいます
何気に絆よりも気軽に
現在はB5→B4→B3→B4と迷走していますが着実に実力はつけていると思います
特に支援兵装での修理とショットガンは一撃必殺でもあるのでとても楽しいです~
昨日には標準軽量機「エンフォーサー」も追加されたのでますます盛り上がるかと
そうそう、ちなみにこの作品のプラモも続々出るそうなのでその辺も楽しみです(^^;)
・・・さて、新しいバイト先探さないとな(チャリーン)
ちなみに言ったか知りませんが10月から1月までバイトしていました
初めてのバイトだったのでいろいろと大変でしたがいい経験になったかと
その代価にちょっとした単位は痛手でしたが(何気にやめるきっかけが言い出せなかったorz)
しかもやめさせられたのがテスト終了直前って・・・鬼ですかオーナー・・・orz
まあそのおかげで毎週つぶれてた土日が有意義に寝れるのでありがたいです
・・・別に悔しくないもんっ!
・・・とまあこんなかんじですね
ボーダーブレイクは夕方が多いのでマッチしたときは「こいつか」と思っていろいろ修理の我侭言ってくださってもかまいませんので
それと主な筐体使用は名古屋、大須か109シネマのところでやっていると思いますのでよろしくです
それでは今日はこの辺で
アディオス!
PS:今期のアニメで「聖痕のクェイサー」ってあるけどニコニコのジャンルに「スタイリッシュ搾○アクション」って・・・なんじゃそらwww
ということでちょくちょく開発中
とりあえず画像をいくつか

I2C通信を想定し考えた送信機
有線式ですがチャンネル設定もできるようにしてみました(4bit=16ch)
ボタンはあるサイトを参考にダイナミック方式をつかってみました

前回紹介した試作のそのまま念のために
蛇足で次のレベル、モータードライバの回路(途中)
まだ考え中ですが7セグが完成ししだいしようと思っていますのでのんびりと
7セグのプログラムはまずは1つの7セグを点灯させるところから
参考書を深読みしていると「リロケータブル」というプログラムを部品化するものがあるそうですが今回はそんなに大規模でもないのでそのままで行こうと思います
しかしタイマの割り込みがちょっと難しいので代わりに無駄処理で時間稼ぎしている構造にしています
ん~ちょっと難しいな・・・
とまあこんなかんじ
明日はブレッドボードで7セグ1個を稼動させる予定です
ではでは~ノシ
PS:今回紹介した回路の電源はいつものように5V電源レギュレーター回路で構成する予定
(ただしモータ電源Vbは別電源にて)
とりあえず画像をいくつか
I2C通信を想定し考えた送信機
有線式ですがチャンネル設定もできるようにしてみました(4bit=16ch)
ボタンはあるサイトを参考にダイナミック方式をつかってみました
前回紹介した試作のそのまま念のために
蛇足で次のレベル、モータードライバの回路(途中)
まだ考え中ですが7セグが完成ししだいしようと思っていますのでのんびりと
7セグのプログラムはまずは1つの7セグを点灯させるところから
参考書を深読みしていると「リロケータブル」というプログラムを部品化するものがあるそうですが今回はそんなに大規模でもないのでそのままで行こうと思います
しかしタイマの割り込みがちょっと難しいので代わりに無駄処理で時間稼ぎしている構造にしています
ん~ちょっと難しいな・・・
とまあこんなかんじ
明日はブレッドボードで7セグ1個を稼動させる予定です
ではでは~ノシ
PS:今回紹介した回路の電源はいつものように5V電源レギュレーター回路で構成する予定
(ただしモータ電源Vbは別電源にて)
現在7セグ回路の構成を考えていますがどうにも今回使おうと考えていたユニバーサル基盤でも綺麗に配線は難しいかもしれない・・・
使おうとしていたのはUP-203という縦15個×横25個位の穴が開いた基盤ですが普通のトランジスタを使うにしても抵抗使用の面積が大きくそれに収めるのは難しそうです
というわけで予定を変更
本来7セグを4つ使う予定でしたが最初は7セグ一つに絞りブレッドボードで構成することにします
個人的に考えていた7セグ点灯回路の構成手順としては
1、ICSPを搭載した試作版の作成
2、I2C通信・ダイナミック点灯プログラムの作成
3、軽量版の作成
という感じでしたが1を更に何段階か分けて構成しようと思います
明日・・・と時間的にはもう今日か・・・
とりあえず今日は午後のテストを終えたら本格的にそれに取り掛かろうと思います
使おうとしていたのはUP-203という縦15個×横25個位の穴が開いた基盤ですが普通のトランジスタを使うにしても抵抗使用の面積が大きくそれに収めるのは難しそうです
というわけで予定を変更
本来7セグを4つ使う予定でしたが最初は7セグ一つに絞りブレッドボードで構成することにします
個人的に考えていた7セグ点灯回路の構成手順としては
1、ICSPを搭載した試作版の作成
2、I2C通信・ダイナミック点灯プログラムの作成
3、軽量版の作成
という感じでしたが1を更に何段階か分けて構成しようと思います
明日・・・と時間的にはもう今日か・・・
とりあえず今日は午後のテストを終えたら本格的にそれに取り掛かろうと思います
なんというかもう電子工作のねたしか更新してないなwww
と思う今日この頃
さて報告の方ですが
「16F88使用ICSP搭載型試験用7セグLED」

一応これが完成形です
それでこれから実態配線図を描きながらいろいろと考えるつもりです
そういえば学校でマイクロマウスをしようと提案されていますが自分はモータードライバ回路が間に合えばやってみようと思います
それと今週の土日から活動態度・方針の更正・修正で土日は全面的に出入り禁止だそうです
何か残念だな・・・(=ω=;)
と思う今日この頃
さて報告の方ですが
「16F88使用ICSP搭載型試験用7セグLED」
一応これが完成形です
それでこれから実態配線図を描きながらいろいろと考えるつもりです
そういえば学校でマイクロマウスをしようと提案されていますが自分はモータードライバ回路が間に合えばやってみようと思います
それと今週の土日から活動態度・方針の更正・修正で土日は全面的に出入り禁止だそうです
何か残念だな・・・(=ω=;)
カレンダー
| 03 | 2026/04 | 05 |
| S | M | T | W | T | F | S |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 |
カウンター
スケジュール
特にありません
最新記事
(06/28)
(04/21)
(02/03)
(01/28)
(11/18)
(11/14)
カテゴリー
アーカイブ
プロフィール
HN:
@knight@(アットナイト)
年齢:
35
HP:
性別:
男性
誕生日:
1990/05/25
職業:
大学生
趣味:
電子工作 絵描き
自己紹介:
とりあえずかっこいいものが好き
でも百合の方がもっと好きです
イラスト・電子工作・物語が好きです
近い目標はいろいろ
いつかこんなの作ってみたいです
プログラムの先生様(卒業?)↓

↑してくれたらうれしいな(^ω^)
でも百合の方がもっと好きです
イラスト・電子工作・物語が好きです
近い目標はいろいろ
いつかこんなの作ってみたいです
プログラムの先生様(卒業?)↓
↑してくれたらうれしいな(^ω^)
ブログ内検索
バーコード
広告