このブログは@knight@のロボット・電子工作方面の活動を書いてるサイトです。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
今回は上下一体型で構成して行こうと思います
ただフリー軸の角を面取りに変えたので上下間のフリー軸の干渉の可能性が発生、修正に感覚を+2~4[mm]増やす予定です
<ペットボトルロケット>
とりあえず天候・環境に問題なかったので打ち上げてきました
しかし3~4回ほど打ち上げるとガムテープで止めた本体がぽっきり折れてしまい次はもう少しがっちりした構成にしようと思います
とはいえこれで感覚は取れたので目的の物の作成に入っていこうと思います
では今日はこの辺で
あさってはテストだー\(^o^)/オワタ
PR
試験も終わって4日経ちました
結果は・・・まあ悲惨だったので次回の11月までには何とかしたいです
<電子工作>
やはりシリアル通信をプログラムでいきなりするのは無理があるので仕様変更、
PICから出るI/Oをトランジスタに介してダイナミック点灯で駆動させる方法で駆動
面積は食いますが確実には動きます
16F88の18ピンではオシレーターを内部発振で駆動させてタイマー1のみ時計用発振器で駆動させる
MCLRは入力しかできないのでスイッチに使用しもう一つもPORTBにプルアップでセット
とりあえずは設計図を作成
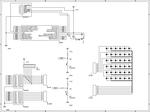
追記1:未記入ですが発信器のコンデンサCは33pFです
まあその前にユニバーサル基盤でテストしないといけないのですが・・・orz
結果は・・・まあ悲惨だったので次回の11月までには何とかしたいです
<電子工作>
やはりシリアル通信をプログラムでいきなりするのは無理があるので仕様変更、
PICから出るI/Oをトランジスタに介してダイナミック点灯で駆動させる方法で駆動
面積は食いますが確実には動きます
16F88の18ピンではオシレーターを内部発振で駆動させてタイマー1のみ時計用発振器で駆動させる
MCLRは入力しかできないのでスイッチに使用しもう一つもPORTBにプルアップでセット
とりあえずは設計図を作成
追記1:未記入ですが発信器のコンデンサCは33pFです
まあその前にユニバーサル基盤でテストしないといけないのですが・・・orz
なんか凄い久々な感じです。
というかそれだけ焦っていたりします
というわけで
○「ledフラッシュ時計」の中間報告
日付:2010/06/14
再度の設計図の見直し

極限に機能制限
パソコンとのシリアル通信はあきらめました
12個3chではなく6個6chでLED回路を構成
外部発振器は時計用の発振器のみで残りは内部発振で動作させる
ハードはLEDも破損させず何とか完成
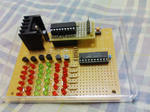
裏はちょっと恥ずかしいのですが・・・^^;
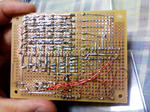
こんな感じです
今回は1層で構成しましたがプリント基板では見える面と見えない面の2枚で構成したほうが腕時計らしくなりそうですね
また駆動電源は重量が重くなりますが1.2vのエネループの3~4本を接続の予定です
というわけで今週末の土曜までにプログラム&プリント基板設計を組んでいますが・・・
ちょっと無理かも・・・(ボソッ
というのも実はプリント基板の作成の翌日はCAD試験2級とちょっと大き目の試験があるのですが・・・
こちらのほうで手一杯だったのでほとんど購入しておいたテキストが新品のままorz
しかもこういう時期に限って重要な試験とかが集中してかなりやばい状況です
なので少し進行は遅れそうです
完成予定は7月以降・・・かな?
おまけ
ちなみにちゃんと光ります

というかそれだけ焦っていたりします
というわけで
○「ledフラッシュ時計」の中間報告
日付:2010/06/14
再度の設計図の見直し
極限に機能制限
パソコンとのシリアル通信はあきらめました
12個3chではなく6個6chでLED回路を構成
外部発振器は時計用の発振器のみで残りは内部発振で動作させる
ハードはLEDも破損させず何とか完成
裏はちょっと恥ずかしいのですが・・・^^;
こんな感じです
今回は1層で構成しましたがプリント基板では見える面と見えない面の2枚で構成したほうが腕時計らしくなりそうですね
また駆動電源は重量が重くなりますが1.2vのエネループの3~4本を接続の予定です
というわけで今週末の土曜までにプログラム&プリント基板設計を組んでいますが・・・
ちょっと無理かも・・・(ボソッ
というのも実はプリント基板の作成の翌日はCAD試験2級とちょっと大き目の試験があるのですが・・・
こちらのほうで手一杯だったのでほとんど購入しておいたテキストが新品のままorz
しかもこういう時期に限って重要な試験とかが集中してかなりやばい状況です
なので少し進行は遅れそうです
完成予定は7月以降・・・かな?
おまけ
ちなみにちゃんと光ります
学祭も終わったので作業再開します
ちなみに大会の結果は・・・聞かないでください
eagleは並行して勉強していますが部品情報の打ち込みが長い作業になりそうです
まずはBSch3Vでユニバーサル用の回路構成を再設計中
明日にでも部品リストと回路図を出します
<スペックメモ>
・ダイナミック点灯制御
・RS232によるシリアル・スレーブ通信
・スイッチ3つによる秒、分、時の調整機能
・クリスタルによる精密発振32.768kHzでタイマー1の動作を行う
・シリアル通信を考え動作発振は20MHz?
・補助としてシリアルーパラレル変換IC(こちら)使用
・※もしもの為に全点灯(36個)に耐えられる設計を行う
→対応策:ダイナミック点灯で交互に点灯させれば問題なし?
・LEDは20~30mAで色は3色に分ける(青、緑、黄?)
・ICSP(PIC書き込み)端子あり
・電源端子(コンセント、電池両方可能)
・レギュレータによる5v1A安定化(廃熱版装着なし)
・逆回転表示機能在り(依頼者の希望)
・一定時間で消灯(内部で時計続行)
・プリント基板では最低両面1枚、もしくは表示用、制御用に計2枚のどちらかで構成すること
・いろいろと遊び要素も入れる
とまあこんな感じです
>>少佐さん
大学のほうでもいろいろあるようなのですが6月19日で大丈夫かと、
鍵のほうはこちらで開けますの大丈夫です。
試作で足と腕を検討中
ヴィジュアル(外観)を重点においていますが性能はそのままにしたモデルを
とりあえず腕と足のコンセプトは以下の通り
腕:できるだけ小さく、細くで構成肩から手にかけて細くする外観を目的にする
足:腕と同じだがパワーをできるだけ大きくしたいので短くしたりする
1年前に行われたロボット講習の一つで産業ロボットのアーム構造を思い出してそれと平行リンクの構造を混ぜてみようかなとも思っています
とりあえずこの案は期間として7月末までとして活動しようと思います
具体構造案は後ほどに
ヴィジュアル(外観)を重点においていますが性能はそのままにしたモデルを
とりあえず腕と足のコンセプトは以下の通り
腕:できるだけ小さく、細くで構成肩から手にかけて細くする外観を目的にする
足:腕と同じだがパワーをできるだけ大きくしたいので短くしたりする
1年前に行われたロボット講習の一つで産業ロボットのアーム構造を思い出してそれと平行リンクの構造を混ぜてみようかなとも思っています
とりあえずこの案は期間として7月末までとして活動しようと思います
具体構造案は後ほどに
というわけでロボットファイトに参加してきました~
今回大学のロボットチームとして参加しましたが他のメンバーがMyロボットを作ったので実質自分だけで活動することになりました
機体名:S・A・G・カスタム(セイロ・エー・ガントーイ・カスタム)
1回戦免除で2回戦目からの戦いとなりましたがすぐに敗退となってしまいました
タッグも足を引っ張る形で4点失点をしてしまい申し訳ないです><
初ファイト選手参加でしたがとても面白かったです
友人二人がSRC1.8k以下で1位、3位でよかったです^^
次回は彼らに負けない機体を作りたいですね
そのなかいくつかの気になった選手にいろいろと交流してきました
ルチオさんの「アーチャー」は赤い羽根帽子と両腕にあるアローが特徴でした
特にアローはバネを使っており片方を展開させて片方でバネを引き手を離すことで射出する機構で大会中でも発射に成功していて凄かったです
サーボは特にオンリーというわけではなく大きさや必要な出力で様々なサーボを使っているそうです
というかんじで今回のイベントは終了!交流会には今回参加せず言ってなかった日本橋のお店にいくつか回ってきました
途中150万画素のwebカメラを購入近いうちにニコニコ生放送もしたいなと思っています
とまあこんな感じで
お疲れ様でした~
(・ω・)>
今回大学のロボットチームとして参加しましたが他のメンバーがMyロボットを作ったので実質自分だけで活動することになりました
機体名:S・A・G・カスタム(セイロ・エー・ガントーイ・カスタム)
1回戦免除で2回戦目からの戦いとなりましたがすぐに敗退となってしまいました
タッグも足を引っ張る形で4点失点をしてしまい申し訳ないです><
初ファイト選手参加でしたがとても面白かったです
友人二人がSRC1.8k以下で1位、3位でよかったです^^
次回は彼らに負けない機体を作りたいですね
そのなかいくつかの気になった選手にいろいろと交流してきました
ルチオさんの「アーチャー」は赤い羽根帽子と両腕にあるアローが特徴でした
特にアローはバネを使っており片方を展開させて片方でバネを引き手を離すことで射出する機構で大会中でも発射に成功していて凄かったです
サーボは特にオンリーというわけではなく大きさや必要な出力で様々なサーボを使っているそうです
というかんじで今回のイベントは終了!交流会には今回参加せず言ってなかった日本橋のお店にいくつか回ってきました
途中150万画素のwebカメラを購入近いうちにニコニコ生放送もしたいなと思っています
とまあこんな感じで
お疲れ様でした~
(・ω・)>
初期LED時計案
(初期)
・PICによる直接制御
・IC使用は無し
(2期案)
・サポートにトランジスタアレイ2個
・ダイナミック点灯制御変更
(3期案)
・シリアル-パラレル変換IC(12bit)1個
・トランジスタ3個
・水晶発振32.768k搭載
・※試作)電源コンセントに5V1~2Aコンセント使用
・本使用)エネループ3本?もしくはボタン電池使用
プリント基板で5mmLED時計版を作成予定です
最終目標はチップLEDですが試作モデルは据え置き型の時計にするつもりです
(初期)
・PICによる直接制御
・IC使用は無し
(2期案)
・サポートにトランジスタアレイ2個
・ダイナミック点灯制御変更
(3期案)
・シリアル-パラレル変換IC(12bit)1個
・トランジスタ3個
・水晶発振32.768k搭載
・※試作)電源コンセントに5V1~2Aコンセント使用
・本使用)エネループ3本?もしくはボタン電池使用
プリント基板で5mmLED時計版を作成予定です
最終目標はチップLEDですが試作モデルは据え置き型の時計にするつもりです
とりあえずフレームを作成してみましたがプログラムが立ち上がりだけなので近いうちに攻撃と移動を作成の予定です
参加の大会
ロボットフォース
5月22日
詳細はこちら
参加機体は「S・A・G・カスタム」
操縦者名「@KNIGHT@」
聞いた話では歩行テストもあるそうですがORCだけみたいですね
トーナメント表も公開されましたね
1回戦目免除(?)らしいので当たる相手が強敵なのは仕方ないですね(^^;)
やられ役はやられ役らしく最後まで足掻こうと思います
参加の大会
ロボットフォース
5月22日
詳細はこちら
参加機体は「S・A・G・カスタム」
操縦者名「@KNIGHT@」
聞いた話では歩行テストもあるそうですがORCだけみたいですね
トーナメント表も公開されましたね
1回戦目免除(?)らしいので当たる相手が強敵なのは仕方ないですね(^^;)
やられ役はやられ役らしく最後まで足掻こうと思います
というわけでいろいろするためにいろいろ勉強しています
電子工作ではプリント基板を設計するためにeugleとpcbeを使う予定です
eugleは設計図を起こせば配線ラインを自動で描いたりしてくれる機能もあるので便利なんですが無料版では制約は大きく主にプリント基板の大きさの制限が一番大きいです
とはいえ初歩的な回路や上手く工夫をする回路ならそれほど問題は無いと思います
pcbeはいろいろと手作業でその中でパーツを作っていくので難しいです。しかしeugle以上の大きさのプリント基板を作ろうとしたらこちらのほうしかないようです
後近頃旋盤も覚えて練習と部品用に2mmのリングスペーサーを作ってみたりしています
GW1日目はこんな感じでしたが残り7日ちょい、ロボットが完成するといいなーとおもいつつ明日も大学へ向かいます
電子工作ではプリント基板を設計するためにeugleとpcbeを使う予定です
eugleは設計図を起こせば配線ラインを自動で描いたりしてくれる機能もあるので便利なんですが無料版では制約は大きく主にプリント基板の大きさの制限が一番大きいです
とはいえ初歩的な回路や上手く工夫をする回路ならそれほど問題は無いと思います
pcbeはいろいろと手作業でその中でパーツを作っていくので難しいです。しかしeugle以上の大きさのプリント基板を作ろうとしたらこちらのほうしかないようです
後近頃旋盤も覚えて練習と部品用に2mmのリングスペーサーを作ってみたりしています
GW1日目はこんな感じでしたが残り7日ちょい、ロボットが完成するといいなーとおもいつつ明日も大学へ向かいます
>>少佐さん
スイッチはプルアップできるPORTBを使ったほうがよさそうですね
どのビットでするかしないかの設定はそれぞれできるのであまった部分も他の用途に使えますね
というわけで修正してみました

修正点
・点灯処理を内部発振にさせる
・外部発振は32.768[kHz]にしてCLKINに接続
・スイッチのピンをPORTBに変更
注1:スイッチはプッシュスイッチを使う
注2:トランジスタアレイは最終的には6ch×2個を使用予定
注3:電源は3.6[v]を使いPICへは昇圧回路にて5[v]上げてから通す予定
注3は内部発振で駆動させるために3vで十分かもしれないので昇圧回路は廃止するかもしれません
前回のイメージ図では単3電池を2つしかつけていなかったのですがそこをどうすれべきか考える必要があリマすね
クロック維持のために3.0vボタン電池と発光用1.2vバッテリー2本を別々に使うプランも計画中です
では今日はこの辺で
スイッチはプルアップできるPORTBを使ったほうがよさそうですね
どのビットでするかしないかの設定はそれぞれできるのであまった部分も他の用途に使えますね
というわけで修正してみました
修正点
・点灯処理を内部発振にさせる
・外部発振は32.768[kHz]にしてCLKINに接続
・スイッチのピンをPORTBに変更
注1:スイッチはプッシュスイッチを使う
注2:トランジスタアレイは最終的には6ch×2個を使用予定
注3:電源は3.6[v]を使いPICへは昇圧回路にて5[v]上げてから通す予定
注3は内部発振で駆動させるために3vで十分かもしれないので昇圧回路は廃止するかもしれません
前回のイメージ図では単3電池を2つしかつけていなかったのですがそこをどうすれべきか考える必要があリマすね
クロック維持のために3.0vボタン電池と発光用1.2vバッテリー2本を別々に使うプランも計画中です
では今日はこの辺で
カレンダー
| 11 | 2025/12 | 01 |
| S | M | T | W | T | F | S |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 | 31 |
カウンター
スケジュール
特にありません
最新記事
(06/28)
(04/21)
(02/03)
(01/28)
(11/18)
(11/14)
カテゴリー
アーカイブ
プロフィール
HN:
@knight@(アットナイト)
年齢:
35
HP:
性別:
男性
誕生日:
1990/05/25
職業:
大学生
趣味:
電子工作 絵描き
自己紹介:
とりあえずかっこいいものが好き
でも百合の方がもっと好きです
イラスト・電子工作・物語が好きです
近い目標はいろいろ
いつかこんなの作ってみたいです
プログラムの先生様(卒業?)↓

↑してくれたらうれしいな(^ω^)
でも百合の方がもっと好きです
イラスト・電子工作・物語が好きです
近い目標はいろいろ
いつかこんなの作ってみたいです
プログラムの先生様(卒業?)↓
↑してくれたらうれしいな(^ω^)
ブログ内検索
バーコード
広告